





Описание

1 x TB6600 Драйвер шагового двигателя 12-42vDC 0,5-4A Microstep 16


Параметры:
Название:TB6600 Драйвер шагового двигателя
Напряжение:12-42vDC
• Сила тока:0,5-4A
Microstep:16
Особенности:
Высокая интеграция и высокая надежность
Интерфейсные сигналы с использованием высокоскоростной изоляции оптопары
Большой выходной ток до 4,5 А
Максимальное входное напряжение DC42V
Защита от перенапряжения. Пониженного напряжения. Защита от перегрузки по току защиты сигнала тревоги
Автоматический полу-поток, уменьшить потребление энергии
Определение клеммы Описание:
CP +: входной терминал положительного импульсного сигнала.
CP-: Входной отрицательный терминал импульсного сигнала.
DIR +: двигатель вперед и назад управления положительный терминал.
DIR-: двигатель переднего и обратного управления отрицательный терминал.
EN +: контроль выключения двигателя положительный.
RU-: двигатель в автономном режиме управления отрицательным терминалом.
A +: Подключите обмотку двигателя A + фазы.
A-: Подключите обмотку двигателя A-phase.
B +: Подключите обмотку двигателя B + фазы.
B-: Подключите обмотку двигателя B-phase.
Рабочее напряжение подключение:
VCC: источник питания постоянного тока положительный (Примечание: 10 в <VCC <42 в).
GND: потери мощности постоянного тока.
Изоляция оптопары входного соединения сигнала:
Общее Анодное подключение: соответственно, CP +, DIR +, EN + подключено к системе управления питанием, если это + 5 В блок питания можно подключить напрямую, если эта мощность больше + 5 В, Должен плюс внешний ограничительный резистор тока R для обеспечения того, чтобы внутреннее оптическое соединение с приводом обеспечивало ток привода 8-15 мА. Импульсный входной сигнал через CP-доступ; точка, DIR-, EN-эффективный на низком уровне.
Общее катодное Соединение: соответственно CP-, DIR-, EN-подключено к системе управления заземляющего терминала (SGND, изолировано от заземления); импульсный входной сигнал с помощью соединения CP + + 5 В; точка, DIR +, EN + в активной высокой. Ограничительный резистор R подключен в одинаковых значениях и обычном анодном соединении.
Обратите внимание: RU конец не может быть подключен, ru эффективно, когда ротор находится в свободном состоянии (автономно), затем вал двигателя может быть повернут вручную, сделать для вашей регулировки. После того, как Ручная настройка завершена, после этого EN в Неправильное состояние, чтобы продолжить автоматический контроль.
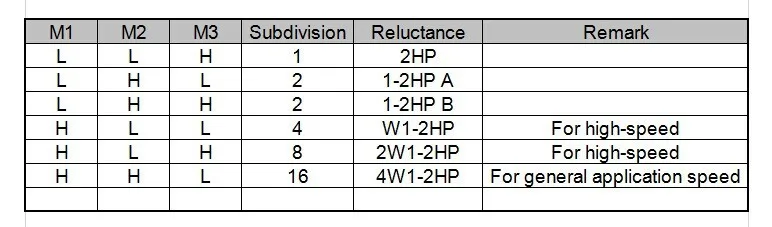
В настоящее время подразделение окружающая Обстановка:

Способы оплаты:
Мы принимаем paypal кредит, банковский перевод, Western Union и т. Д.
Оплата должна быть произведена в течение 7 дней календарных дней после окончания аукциона.
Проблемы и отзывы:
Пожалуйста, неОставьте любые негативные отзывы, прежде чем связаться с нами.
Мы честный и полезный поставщик, мы постараемся сделать все возможное, чтобы решить проблемы с вами.
Ваше удовлетворение очень важно для нашего магазина, поэтому, пожалуйста, свяжитесь с нами, прежде чем вы хотите оставить негативные отзывы.
Заранее большое спасибо.
Возврат:
Если у вас естьНе устраиваетЕсли посылка повреждена, пожалуйста, не подписывайте ее и немедленно свяжитесь с нами.
Если это возможно, пожалуйста, сделайте несколько фотографий или сделайте небольшое видео об этом. Это поможет нам решить проблемы.
Примечание:
Мы можем произвести продукт в соответствии с дизайном нашего клиента.
Если вам нужно что-то особенное, пожалуйста, свяжитесь с нами об этом.
Мы готовы помочь вам в этом.
Характеристики
- Номер модели
- TB6600
- Напряжение
- 36 В
- Тип двигателя
- Шаговый электродвигатель
- Питание
- DC
- Бренд
- G-PENNY MACHINE
- Application
- Stepper Motor Driver
- Current
- 0.5-4A
- Voltage
- 12-42vDC
- Microstep
- 16
Сопутствующие товары









